FLP 不可能定理介绍
前言
FLP 不可能定理与 CAP,BASE 定理等一样,都是分布式系统的基本理论,因此我们有必要了解该理论。
本博客摘抄了此 博客 中对 FLP 不可能定理的部分描述。
定义
1985 年,Fisher、Lynch、Paterson 三位科学家就发表了关于分布式一致性问题的不可能定理:在完全异步的分布式网络中,故障容错问题无法被解决。( We have shown that a natural and important problem of fault-tolerant cooperative computing cannot be solved in a totally asynchronous model of computation)
说得更直白点:在异步网络中,不可能存在能够容忍节点故障的一致性算法,哪怕只有一个节点故障。并且这里并没有考虑拜占庭错误,而是假设网络非常稳定、所有的消息都能被正确传递、并且仅被传递一次,即便如此都不可能找到能容忍哪怕只有一个节点失效的一致性协议,可见该结论有多强。( In this paper, we show the surprising result that no completely asynchronous consensus protocol can tolerate even a single unannounced process death. We do not consider Byzantine failures, and we assume that the message system is reliableit delivers all messages correctly and exactly once)
现实生活中的系统往往都是异步系统。因为系统中各个节点之间的延时,是否宕机等等都是不确定的。那么,在最小化异步模型系统中,是否存在一个可以解决一致性问题的确定性共识算法?
FLP 不可能定理的最大适用前提是异步网络模型。何为同步、异步模型呢?
- 所谓异步模型,是说从一个节点到另一个节点的消息延迟是有限的,但可能是无界的(finite but can be unbounded)。这就意味着如果一个节点没有收到消息,它无法判断消息到底是丢失了,还是只是延迟了。也就是说,我们无法通过超时时间来判断某个节点是否故障。
- 所谓同步模型,是说消息传递的延迟是有限的,且是有界的。这就意味着我们可以通过经验或采样精确估算消息的最大可能延迟,从而可以通过超时时间来确定消息是否丢失、节点是否故障。
所幸的是,我们所处于的真实的网络世界更接近同步模型,在很多场景上,我们都可以通过经验或采样确定最大超时时间。举个通俗点的例子:你给朋友快递了一本书,朋友过了 3 天还没收到,此时朋友很难判断到底是快递延迟了,还是快递出问题送丢了。但是如果过了一个月,朋友仍没收到书,基本就可以断定快递送丢了。而背后的推论就是基于经验或统计:通常快递都能在 1-2 周内送达。显然,异步模型其实是反映了节点间通讯的最差情况、极端情况,异步模型包含了同步模型,即能在异步模型上有效的一致性协议,在同步模型上也同样有效。而同步模型是对异步模型做了修正和约束,从而使得更接近真实世界,也使得在实践中一致性问题有可能得到有效解。
另外,即便是在异步网络模型下,FLP 也并不意味着一致性永远无法达成,只是说无法保证在有界的时间(in bounded time)内达成。在实践上,如果放宽对 bounded time 的限制,仍然是有可能找到实践中的解法的。
根据 DLS 的 研究,一致性算法按照网络模型可以分为三大类:
- 部分同步网络模型(partially synchronous model)中的一致性协议可以容忍最多 1/3 的任意错误。这里的部分同步模型是指网络延迟是有界的,但是我们无法提前得知。这里的容错也包含了拜占庭类错误。
- 异步网络模型(asynchronous model)中的确定性协议无法容忍错误。这里的异步模型即是前文所说的网络延迟是无界的。该结论其实就是 FLP 不可能定理的含义,在完全异步网络中的确定性协议不能容忍哪怕只有一个节点的错误。
- 同步网络模型(synchronous model)可以达到惊人的 100% 容错,虽然对错误节点超过 1/2 时的节点行为有限制。这里的同步模型是指网络延迟一定是有界的,即小于某个已知的常数。
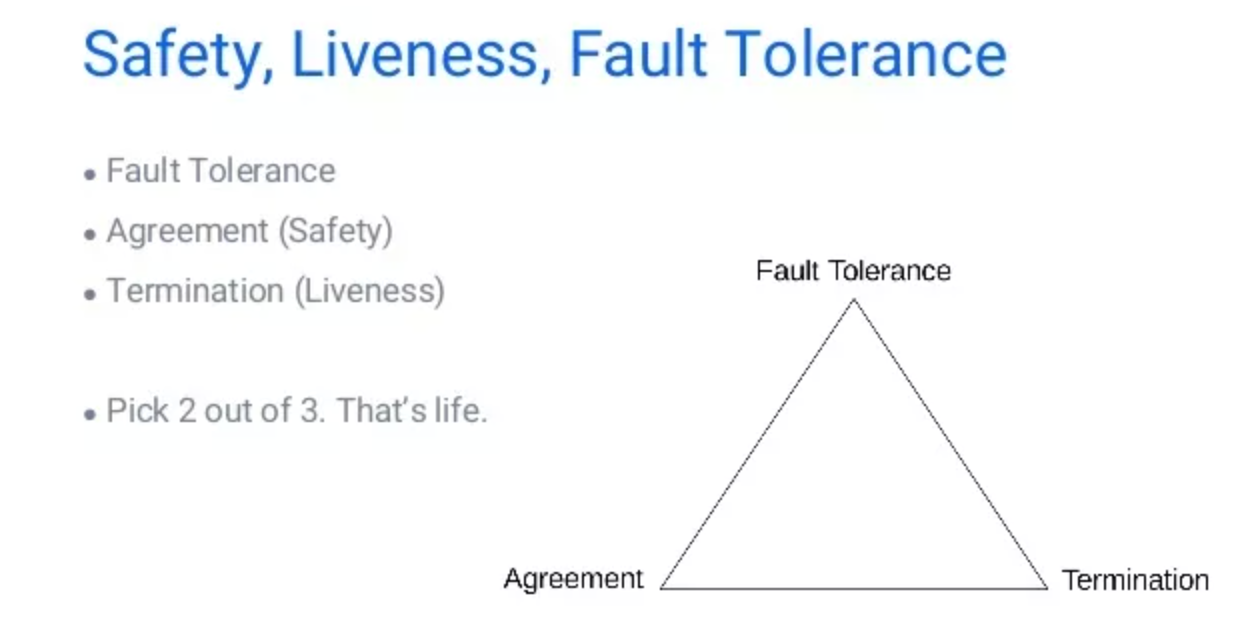
从另一个角度来理解,FLP 实际上考虑了分布式系统的 3 个属性:安全 (safety)、活性(liveness)、容错:
- 安全是说系统内各个节点达成的值是一致的、有效的。safety 其实是保证系统一致性运行的最低要求,其核心是 cannot do something bad,即不能干坏事、不能做错事。
- 活性是说系统内各个节点最终(在有限时间内)必须能够达成一致,即系统必须能够向前推进,不能永远处于达不成一致的状态。liveness 其实是更高要求,意味着不能只是不干坏事,也不能一直不干事,you must do something good,即必须使得整个系统能良好运转下去。
- 容错是说该协议在有节点故障的情况下也必须能有效。
FLP 不可能定理其实意味着在异步网络中,不可能存在同时满足这三者的分布式一致性协议。因为分布式环境中,节点故障几乎是必然的,因此容错是必须要考虑的因素,所以 FLP 不可能定理就意味着一致性协议在能做到容错的情况下,没办法同时做到安全性与系统活性。通常在实践中,我们可以做出部分牺牲,比如牺牲一部分安全性,意味着系统总能很快达成结论,但结论的可靠性不足;或者牺牲一部分系统活性,意味着系统达成的结论非常可靠,但可能长时间、甚至永远都在争论中,无法达成结论。所幸的是,很多时候现实世界的鲁棒性很强,使一致性协议失效的倒霉事件发生的概率也很可能极低。例如分布式共识协议 Paxos 和 Raft 都是保证了容错性和 safety,然后通过随机超时时间来规避 liveness 的问题。
FLP 不可能定理的推导和应用可以参考此 博客。
此外,有关论文 Impossibility of Distributed Consensus with One Faulty Process 的阅读博客可以参考 理解 FLP-Impossibility 论文。
与 CAP 定理的区别
CAP 与 FLP 看起来有相似之处,其实二者并不尽相同,二者是从不同的维度思考问题,另外即使是很相似的概念,内涵也并不完全一样。比如:
- FLP 面对的是分布式一致性问题,而 CAP 面对的是分布式网络中的数据同步与复制。
- FLP 是说在异步网络模型中,三者不可能同时实现;而 CAP 是说在所有场景下,三者都不可能同时实现。
- FLP 中的 liveness 强调的是一致性算法的内在属性;而 CAP 中的 availability 强调的是一致性算法对外呈现的外在属性。
总结
本篇博客摘抄了部分优质博客对 FLP 不可能定理的介绍,以做学习记录和索引。